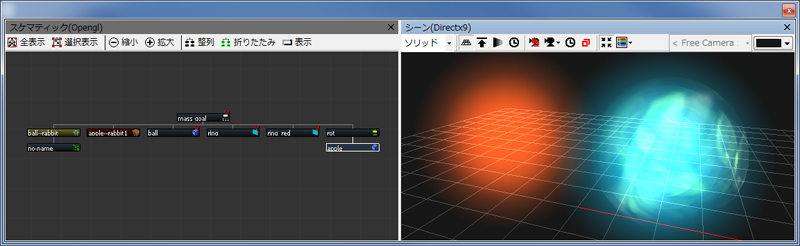
ゴールフィールドを使った集まる粒子
球とりんごの形から、うさぎの形へ集まる粒子の粒を作成します。
この動きはゴールフィールドを使って作ります。
オレンジの粒はマスパーティクル、黄の粒はパーティクルのエミッターを使用しています。
「エフェクトルート」を作成し、「パーティクルエミッター」「マスパーティクルエミッター」を
追加します。
「パーティクルエミッター」には、「フィールド」の「ゴールエミッター」を追加します。
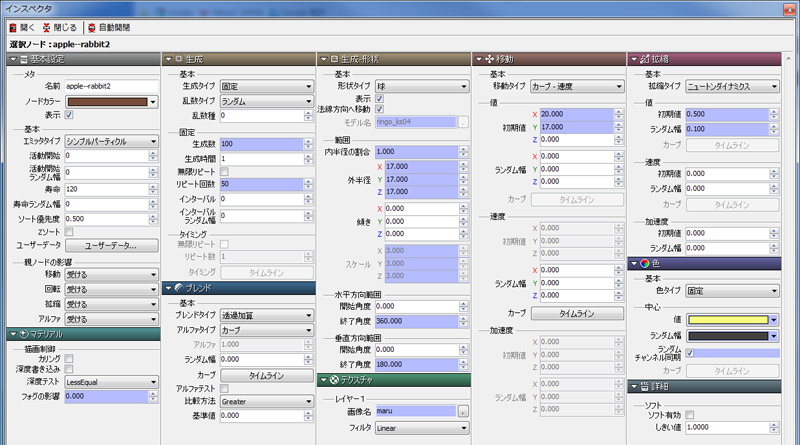
シンプルパーティクル「ball–rabbitエミッター」
生成タブ 生成数:100 リピート回数:50
生成-形状タブ 形状タイプ:球 法線方向へ移動にチェック
内半径の割合:1.0 外半径(X、Y、Z):(17、17、17)
移動タブ 移動タイプ カーブ-速度
初期値 (X、Y、Z):(20、17、0)
速度 タイムライン:X、Y、Zをそれぞれ40フレーム–0、60フレーム–5
拡縮タブ 初期値:0.5 ランダム幅:0.1
ブレンドタブ ブレンドタイプ:透過加算 アルファタイプ:カーブでだんだん現れてだんだん消えていくように
「ゴールエミッター」
形状タイプ:ここでは「bunny01.dae」を選択。最終的な形にしたいモデルを選択します。
スケール:0.3、0.3、0.3
期間 開始:0.4 終了:0.7
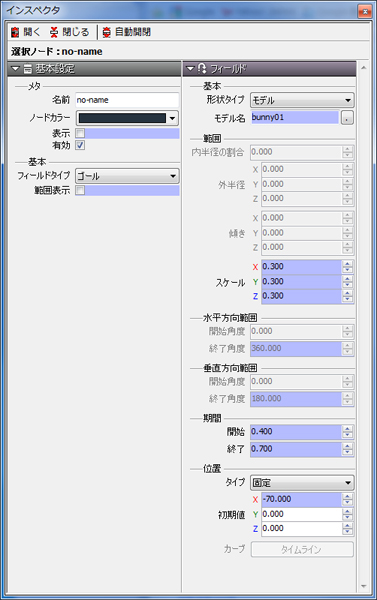
これで、黄色の粒が-X側にうさぎの形に集まるようになりました。
放出する形を変えたい場合は「ball–rabbitエミッター」の生成-形状タブの部分を変更、
集まる形を変えたい時は「ゴールエミッター」の形状タイプを変更します。
次にマスパーティクルの設定をします。
マスパーティクルにはフィールドエミッターを設定する事が出来ませんが、
インスペクタの中にゴール機能があり、これで集まる形を設定する事が出来ます。
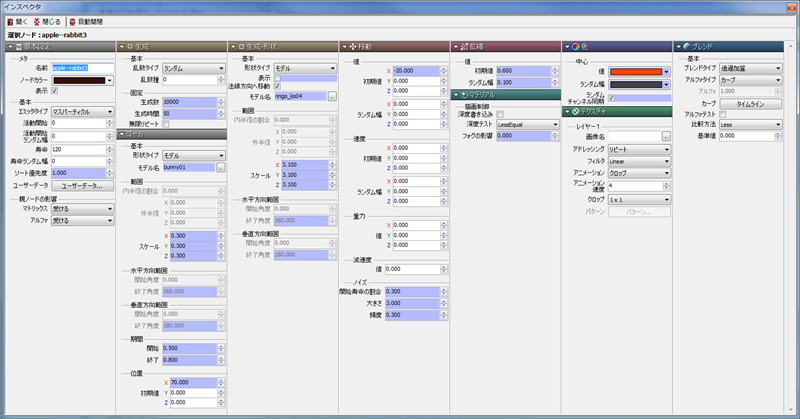
マスパーティクル「ball–rabbit1エミッター」
基本設定タブ ソート優先度:1.0
生成タブ 生成数:10000 生成時間:50
生成-形状タブ 形状タイプ:モデル 法線方向へ移動:オン
ここで、スタート時の形状のモデルを読み込ませ、大きさを調整します。
このチュートリアルでは、リンゴのモデルを用意しました。
移動タブ 初期値 (X、Y、Z):(-20、0、0)
ノイズ 開始寿命の割合:0.3 大きさ:3.0 頻度:0.3
拡縮タブ 初期値:0.6 ランダム幅:0.1
ゴールタブ 形状タイプ:ここでは「bunny01.dae」を選択。最終的な形にしたいモデルを選択します。
スケール:0.3、0.3、0.3
期間 開始:0.5 終了:0.8
位置 (X、Y、Z):(70、0、0)
粒が広がる時の演出を追加します。
中心を光らせたり、広がるフラッシュを追加しました。
完成しました。
粒の集まるスピードを調整したい時は、放出時の「移動タブ」
「ゴール」の期間:開始、終了の数値を調整して下さい。